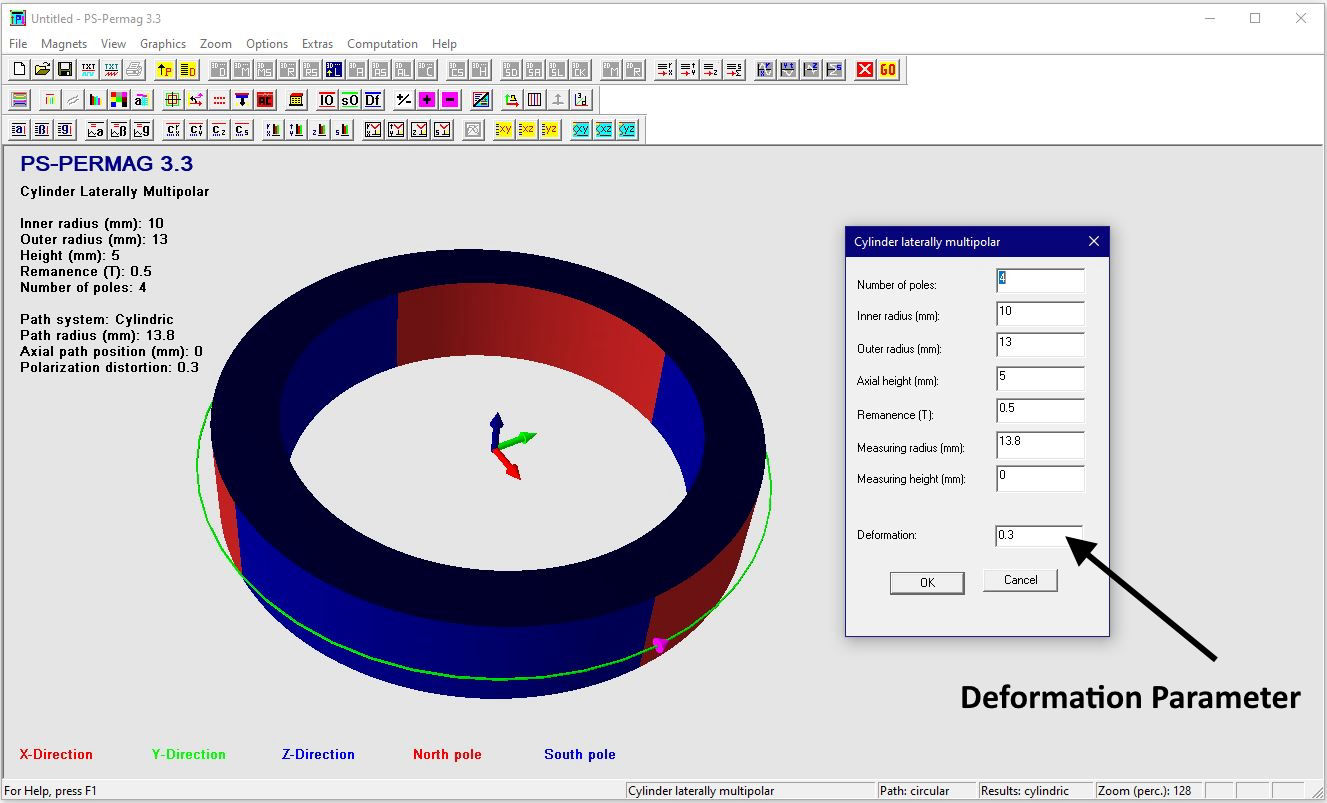
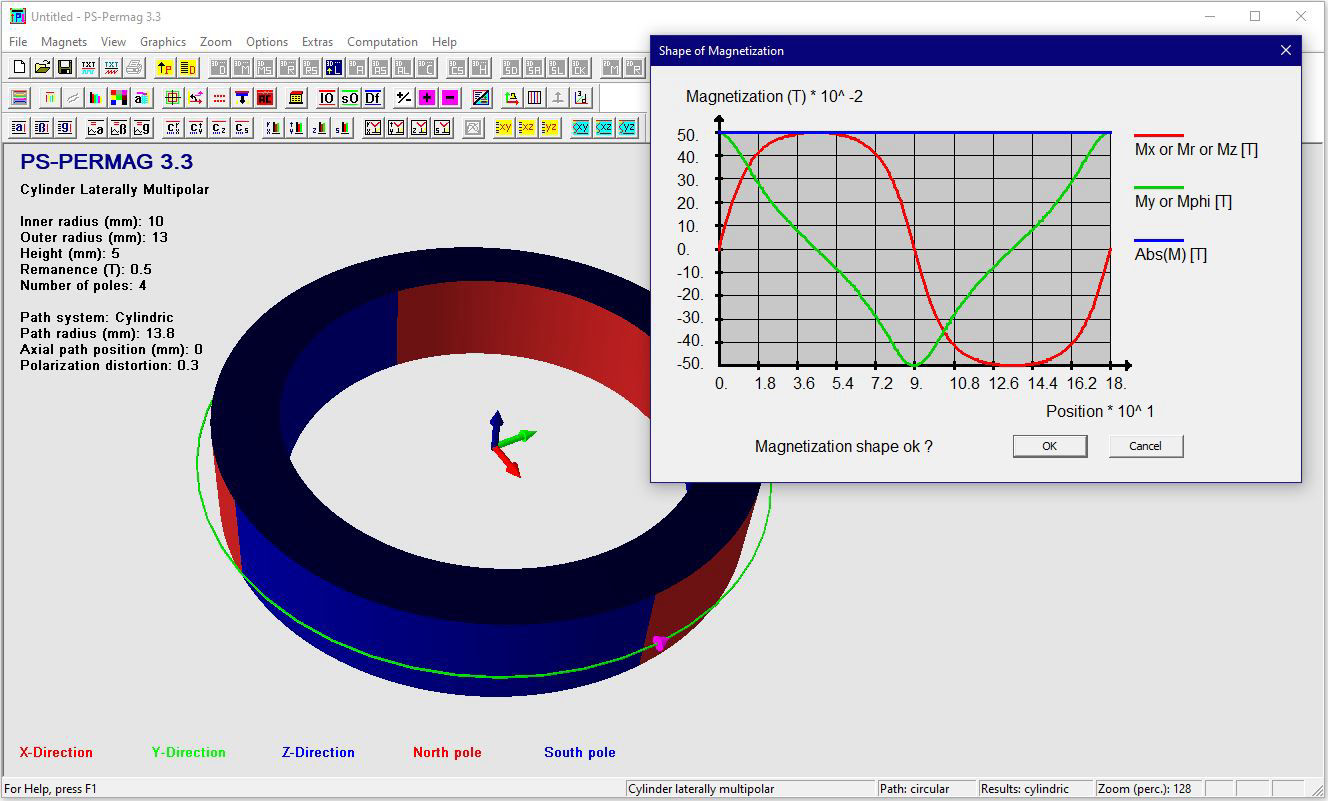
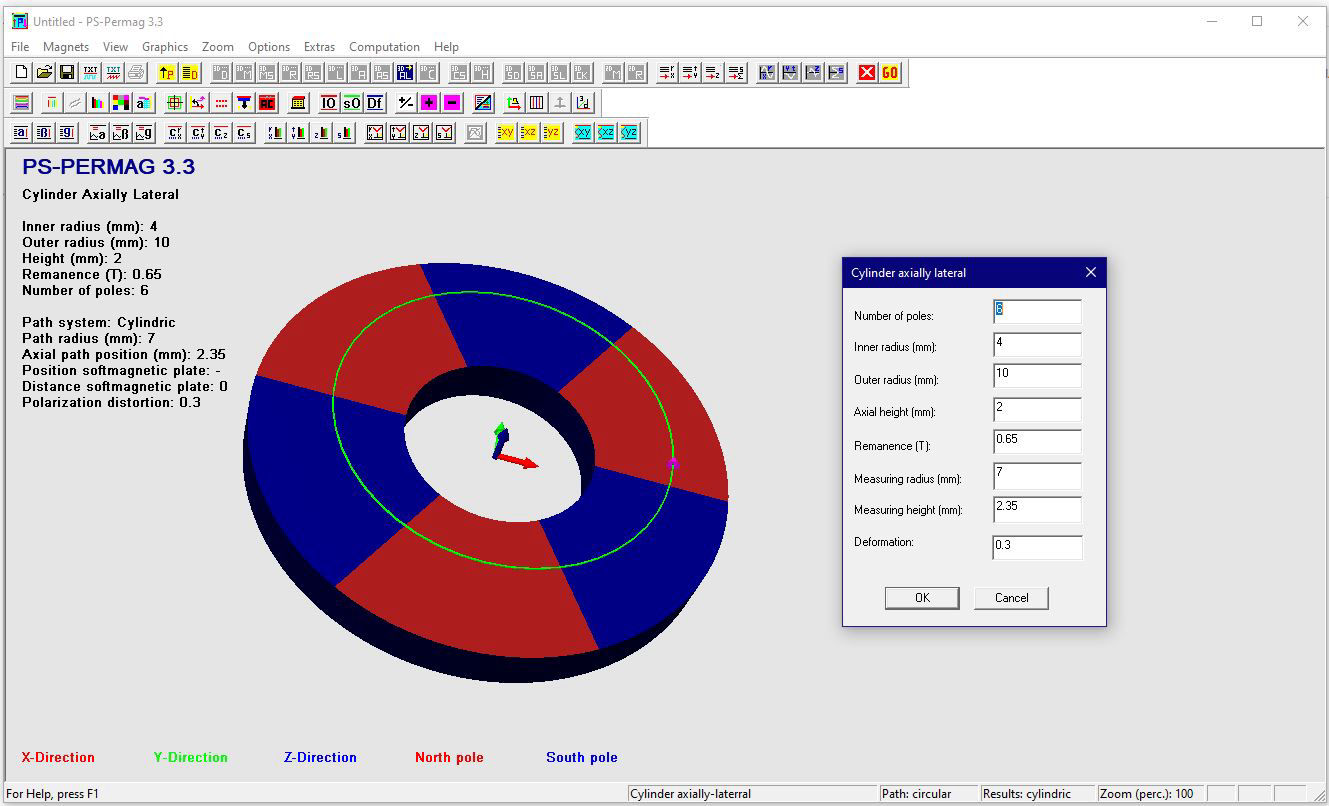
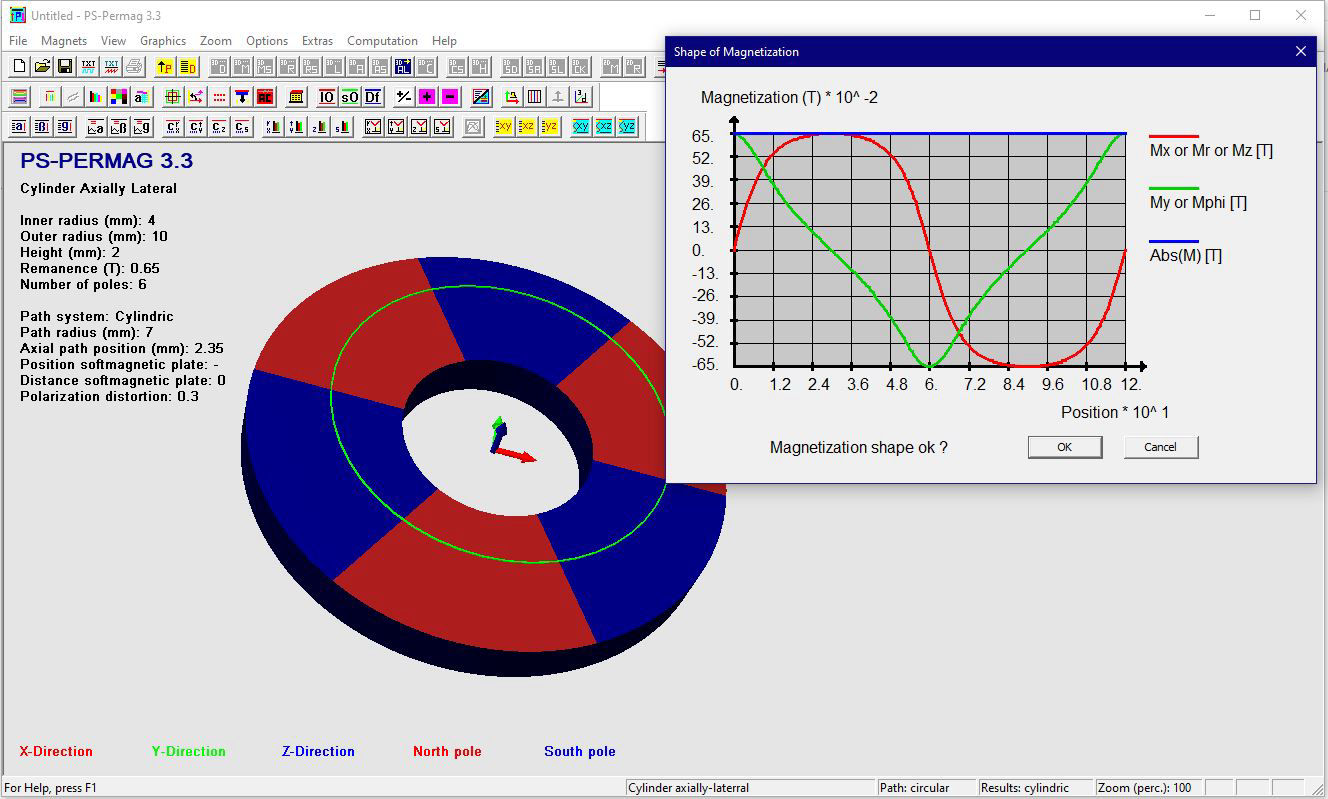
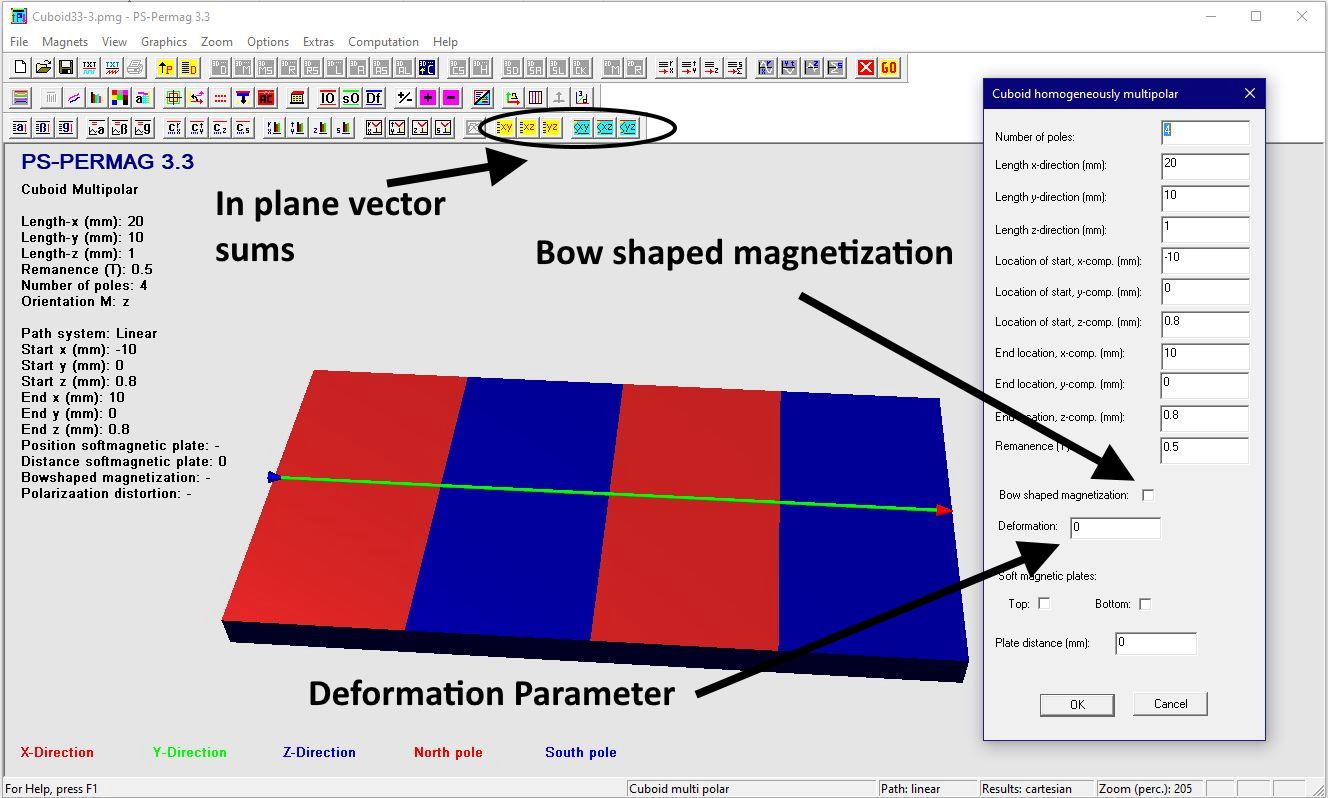
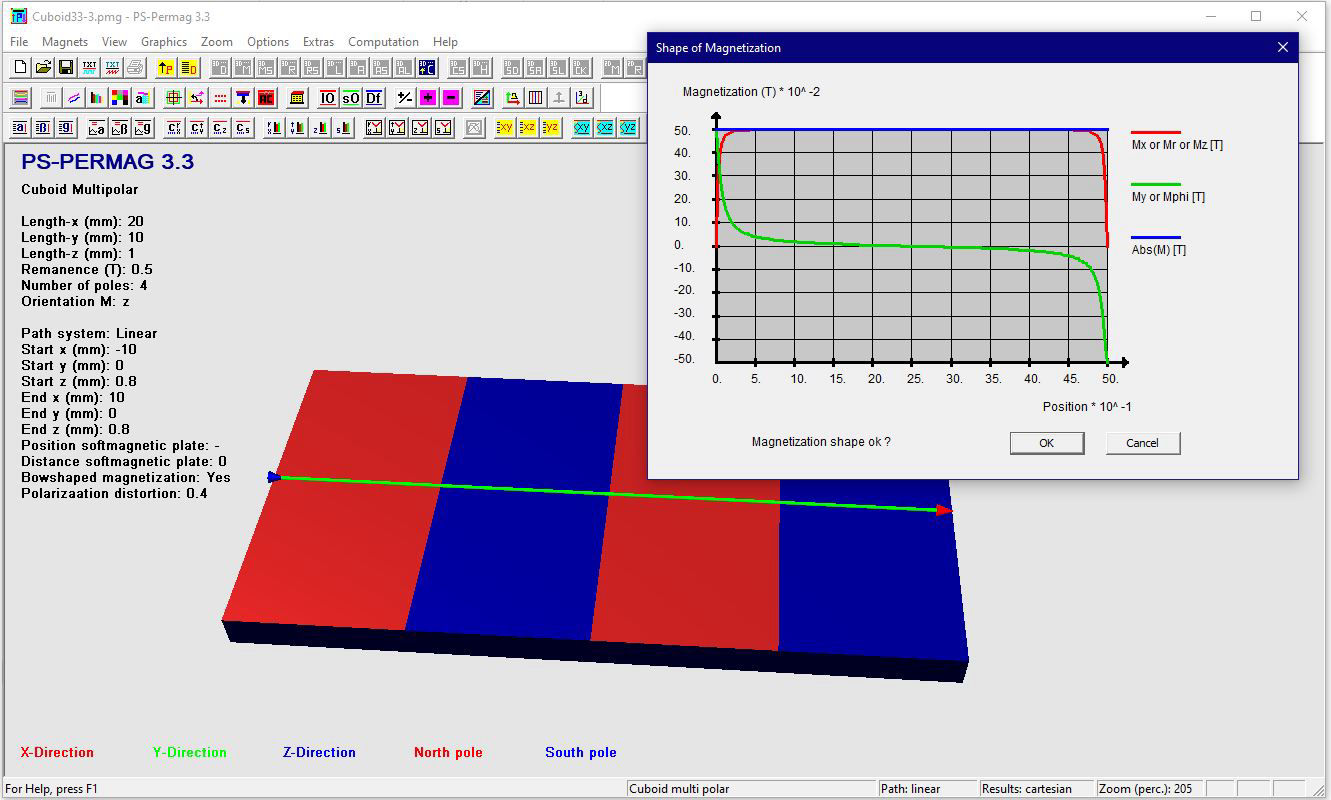
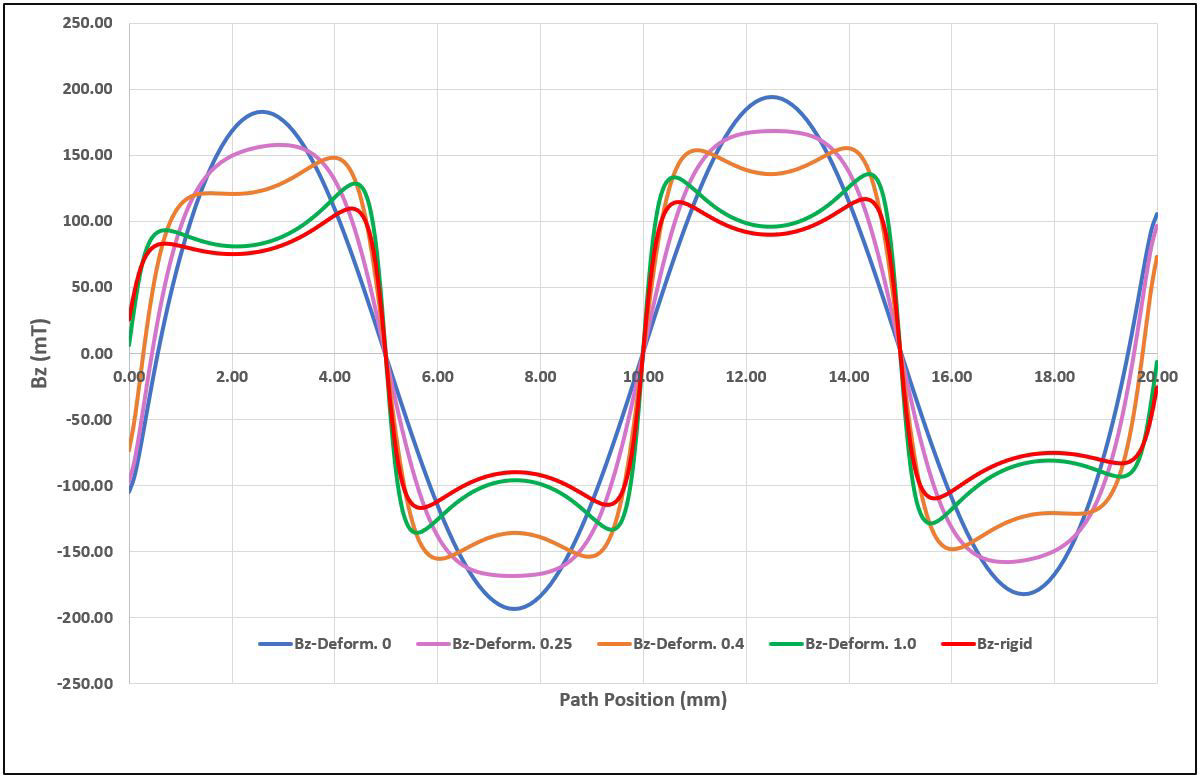
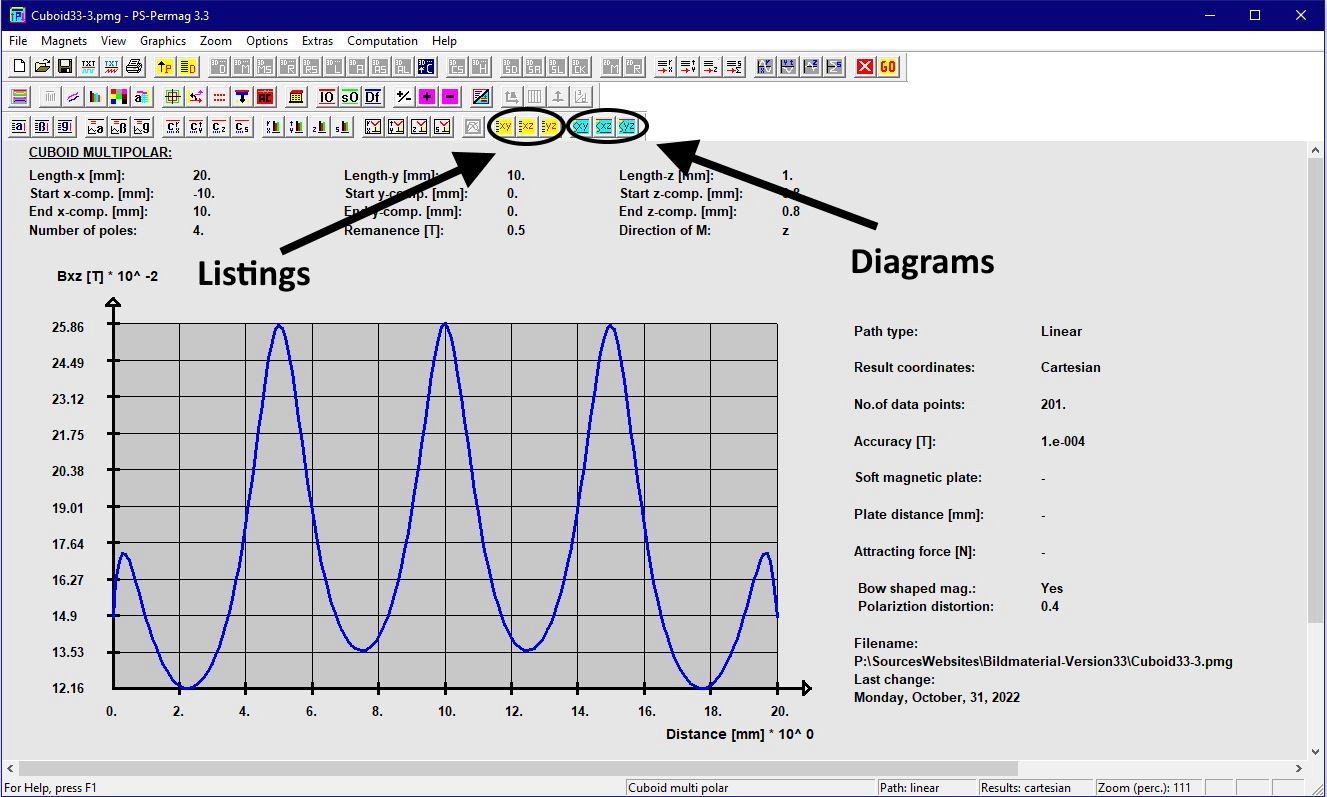
A bow shaped magnetization has been implemented into version 3.3 as a new option for the multipolar cuboid (C-option in symbol bars). The default magnetization for this kind of specimen is still a rigid, alternating magnetization with an uniform direction within the single poles. By marking the respective dialog input as being shown in the following picture, magnetization can be switched to a bow shaped one. If in the input dialog the deformation parameter below is still set to zero, then the polarization will be perfectly sinusoidal, while with other values it is deformed. In case the deformation parameter is 1 a nearly perfect axial magnetization with only minor transition zones to the other poles will me modelled. When a bow shaped magnetization has been chosen there is always a slow decrease of vector sum of magnetization into the inside of the magnet, as it is mostly the case for a real magnetization process. If the bow shaped magnetization were not marked the deformation parameter would not have an impact on the default rigid magnetization.
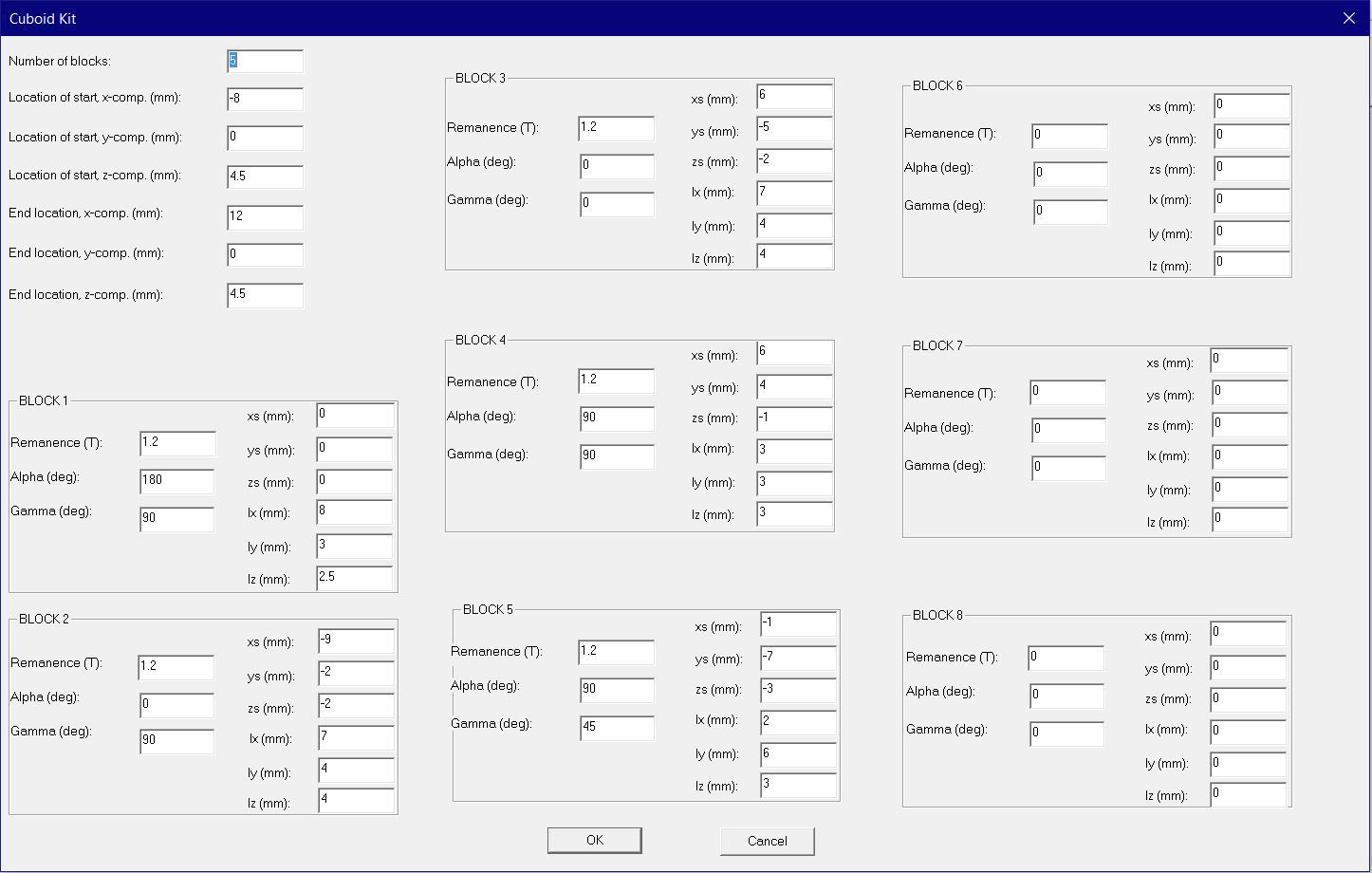
The screenshot below additionally highlights buttons for listings and and diagrams for two- dimensional vector sums, which have been implemented for all kinds of magnets in version 3.3. Those will be treated in the next subchapter.