Look at the Screenshots and texts below to get deeper insights into the capabilities of PS-PERMAG
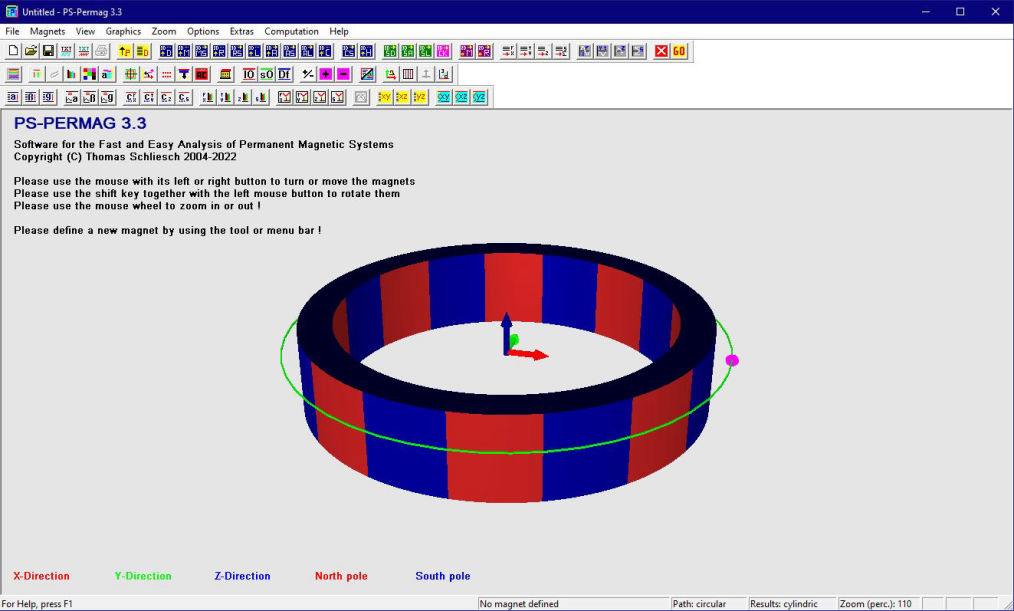
PS-PERMAG 3.3: The picture below shows a typical input dialog of a 3D analysis on the lower left side of the window. As there are only a few parameters to be defined for an analysis, the field computation can be started immediately. Also the computation itself commonly needs only a few seconds on modern personal computers. The handling of PS-PERMAG is very easy and is maintained by an extensive help system, shown here by an example on the right side
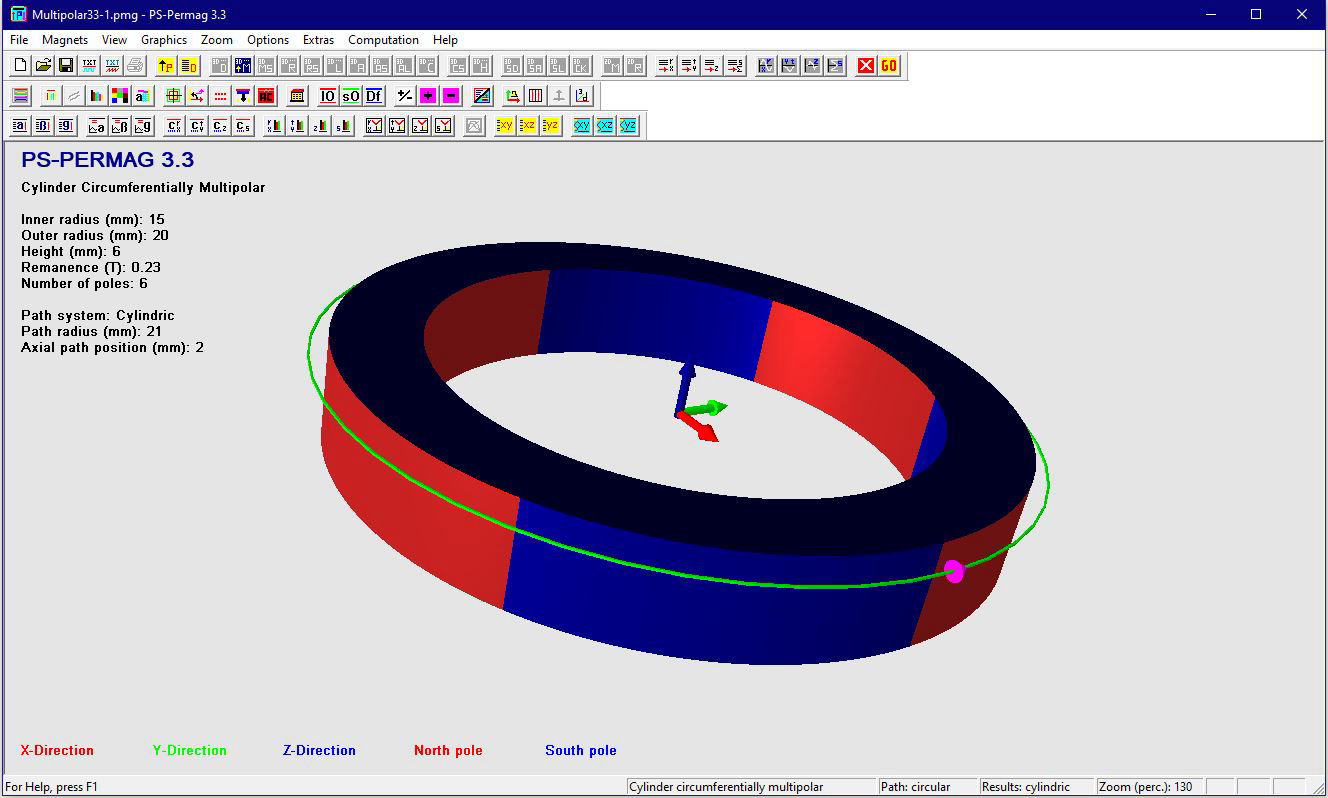
PS-PERMAG 3.3: Beside diagrams and lists of results PS-PERMAG is now able to show 3D models of the magnets together with the paths of field calculations. By this it can be checked easily if the problem has been defined adequately. The example below shows a 6 pole ring magnet with circular path.
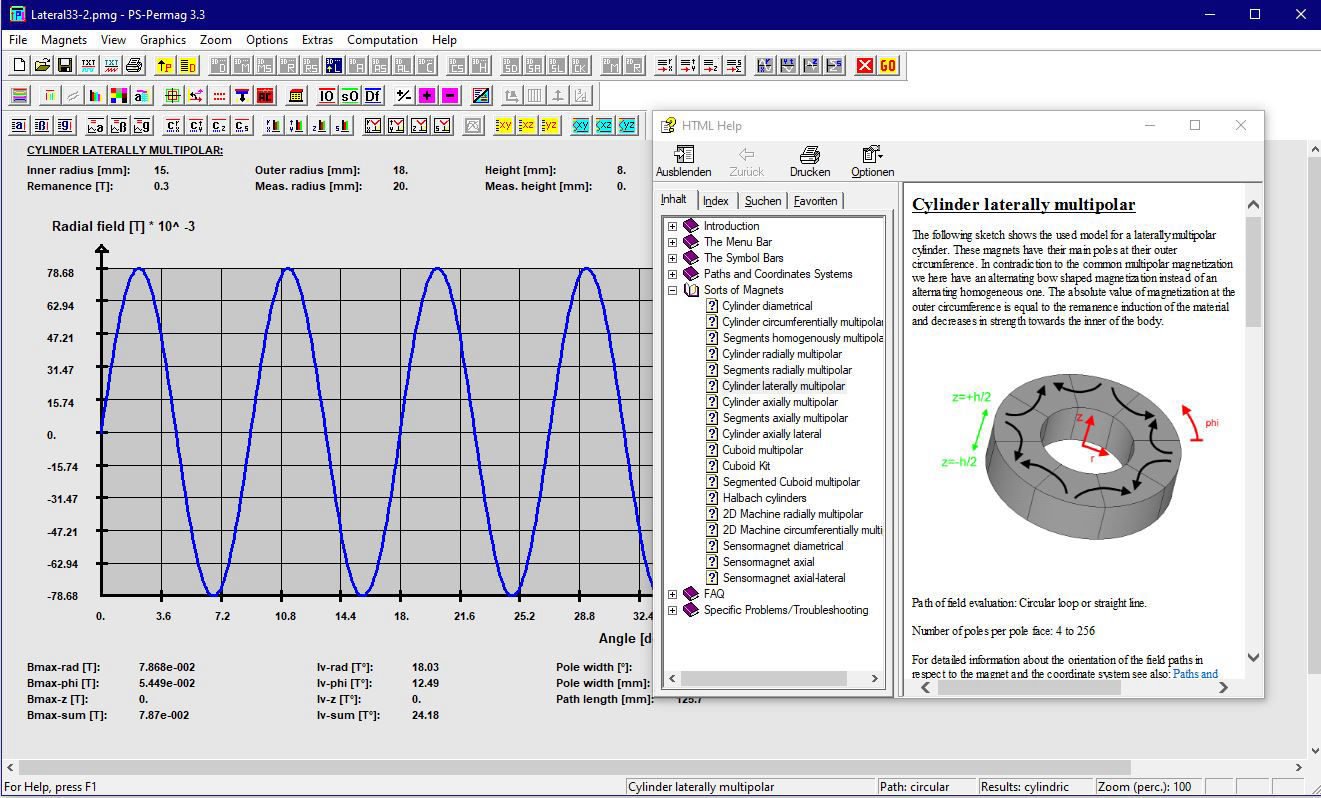
PS-PERMAG 3.3: Radial field distribution of a laterally magnetized magnet around its outer circumference. Easily the sinusoidal shape of the field can be seen. Additional parameters like extreme values or path integrals are provided by the software.
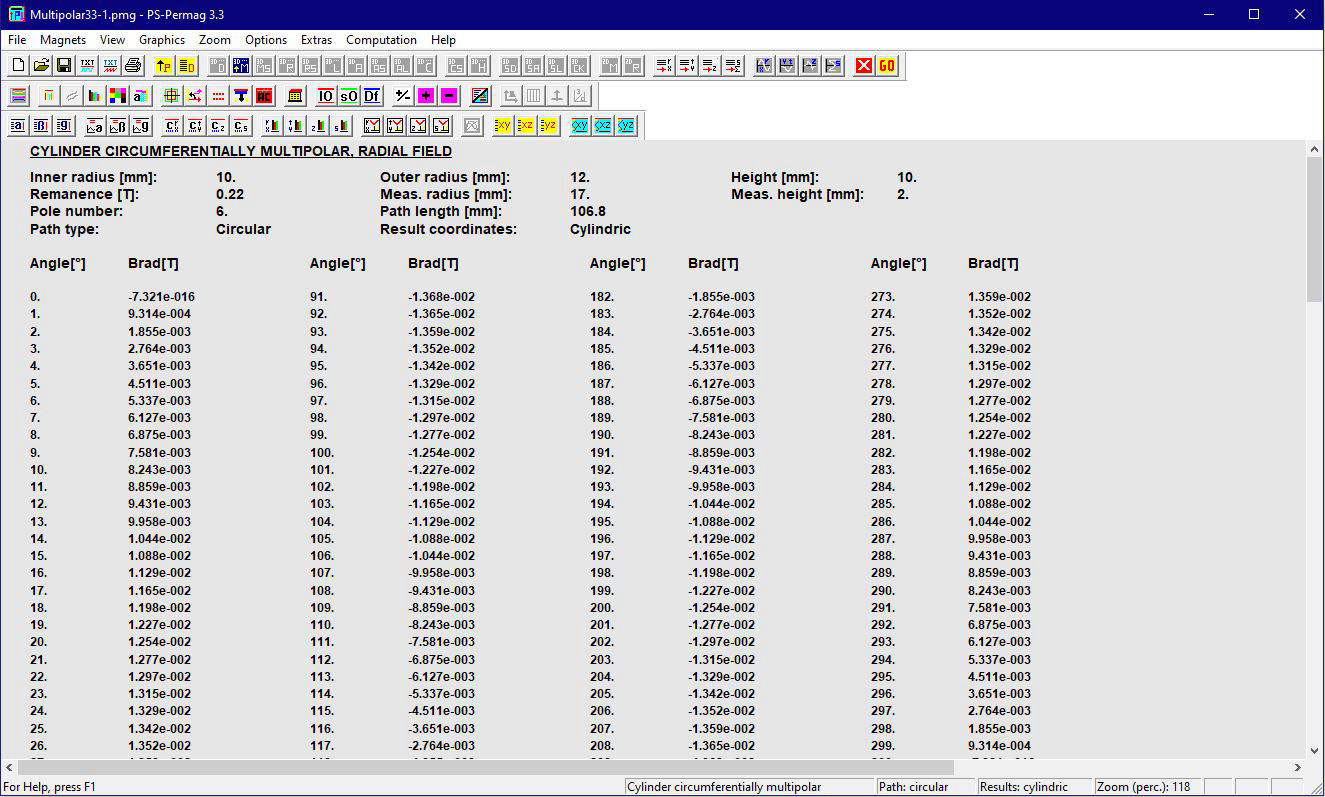
PS-PERMAG 3.3: A tabular list of computed field values is shown below. In one computational run all field components on a defined result path are calculated by the program. Beside listing the parameters within the software, additionally the ASCII export of the computed fields is possible. So the data can be analyzed subsequently in third party software like in spreadsheet programs.
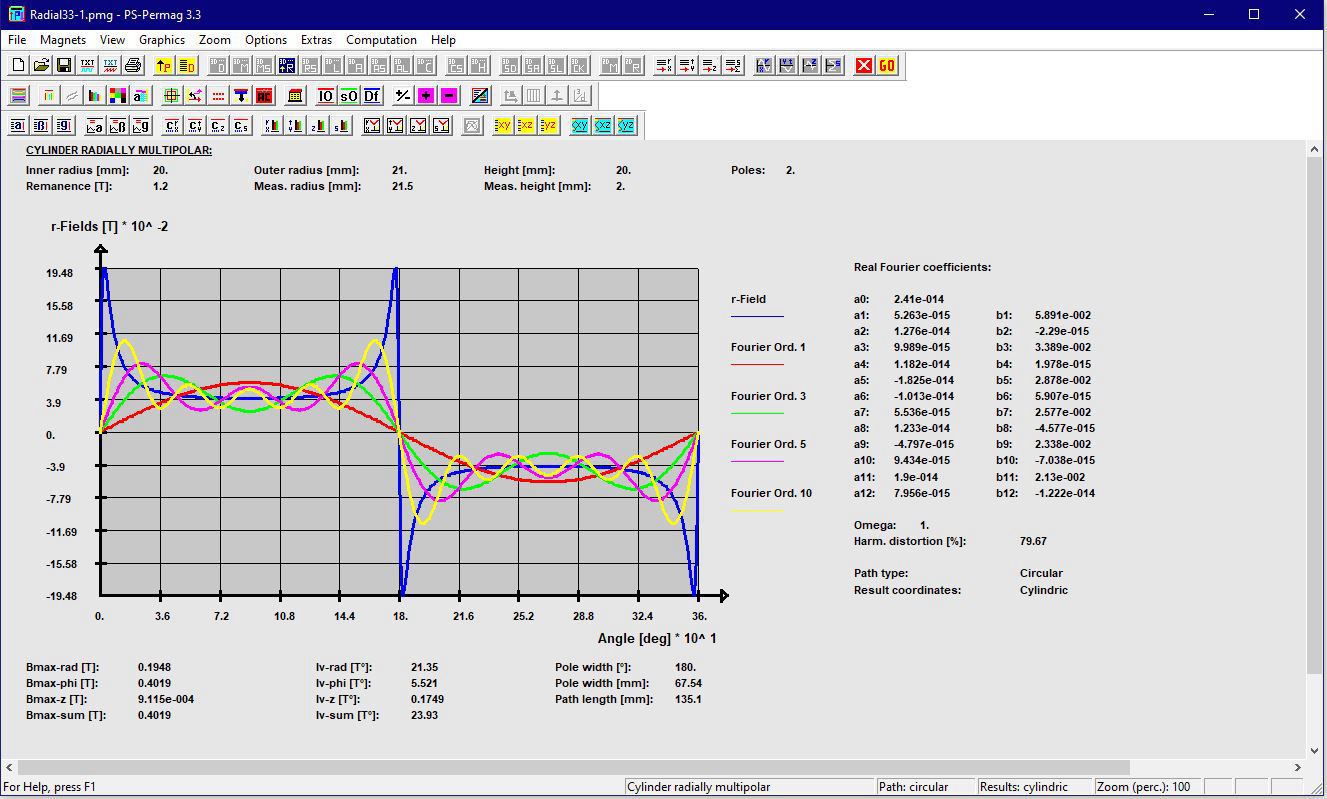
PS-PERMAG 3.3: Beside an external analysis of the field values, which is possible by the ASCII export of the data, PS-PERMAG provides the output of several additional result parameters like minimum and maximum fields, integrals or field angles. One feature that is of special importance for sensor technology is the harmonic analysis (Fourier analysis) of the fields. The screenshot below shows the Fourier series approximation of the radial field of a radially multipolar cylinder magnet.
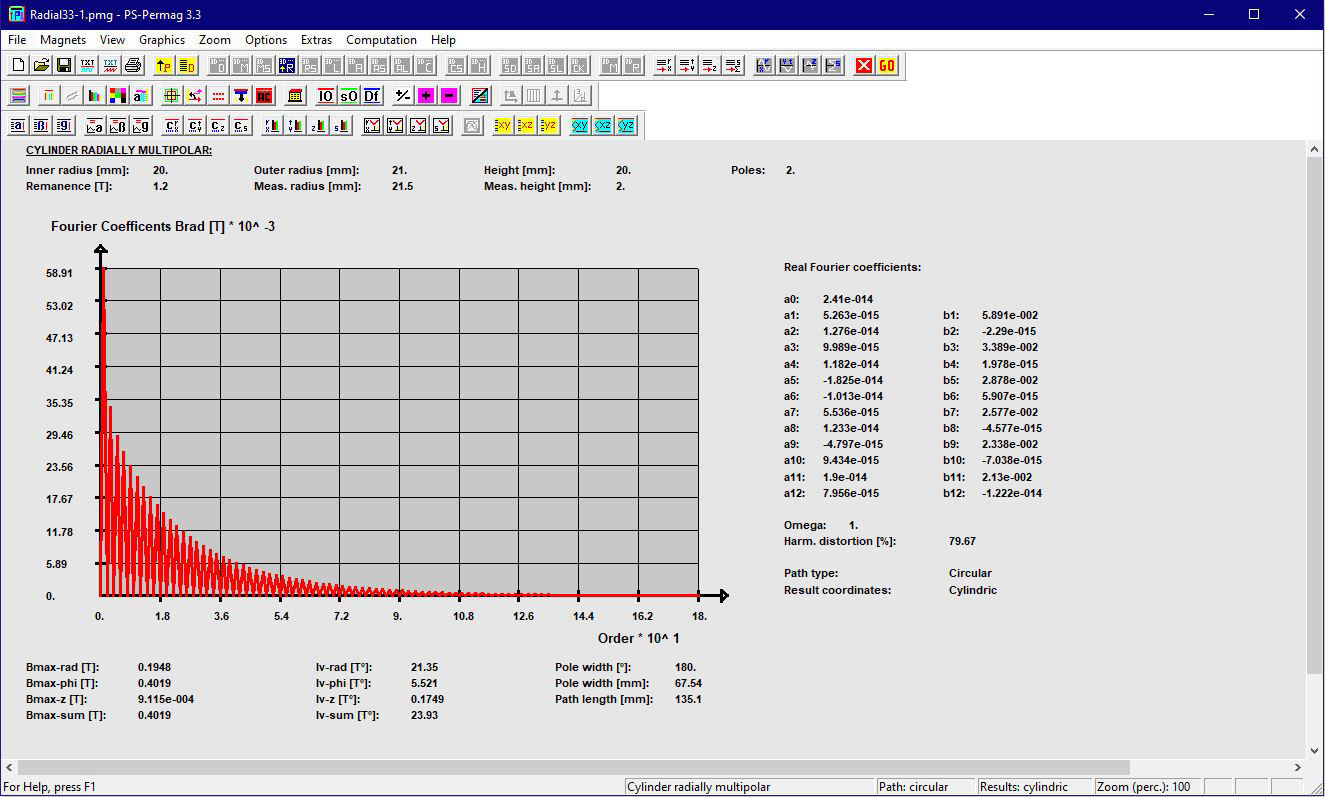
PS-PERMAG 3.3: The Fourier series expansion of field components calculates harmonic coefficients up to the order N in case of periodic functions, where N is the number of path points per half period. In addition also non periodic distributions can be analyzed by use of Fourier integrals. Beside tabular listings, additionally graphical wave spectra can be plotted as shown below for a cylindrical magnet with a two pole radial magnetization.
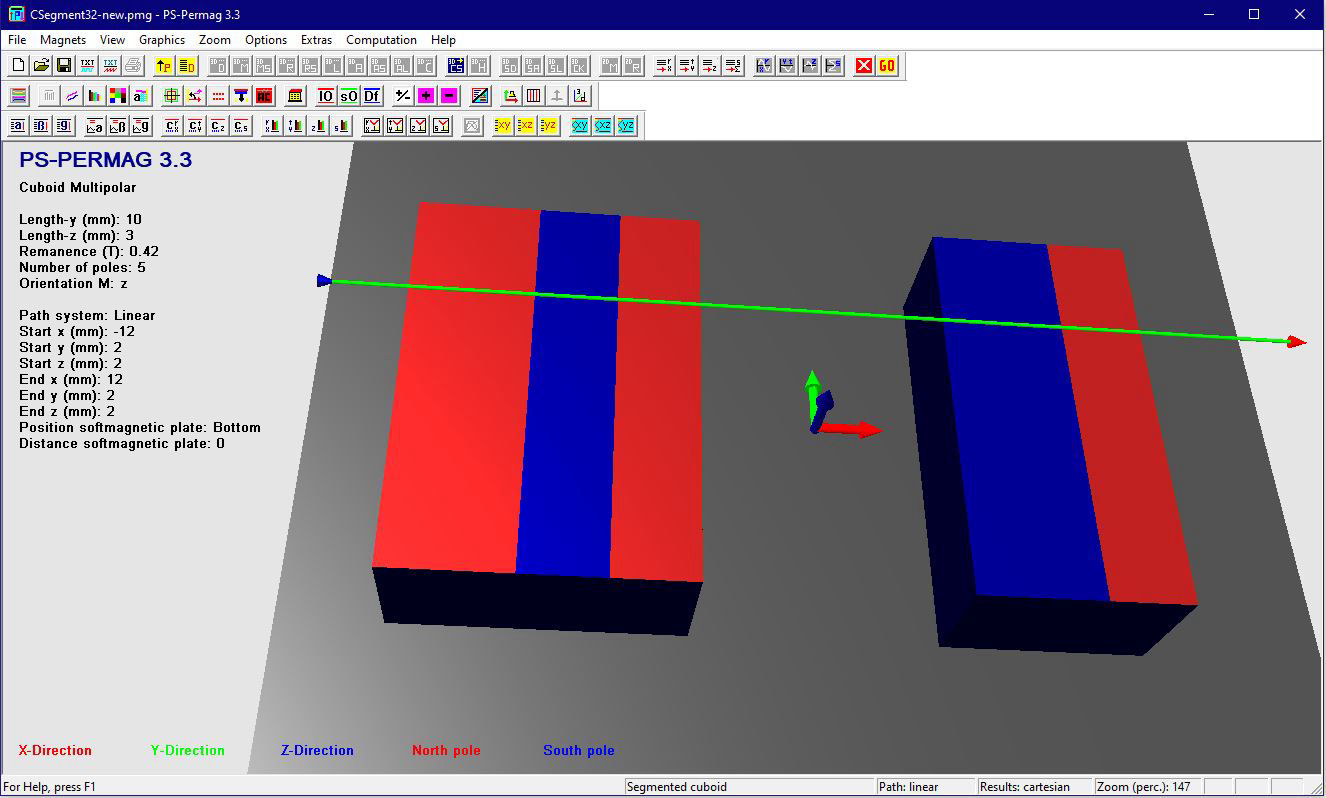
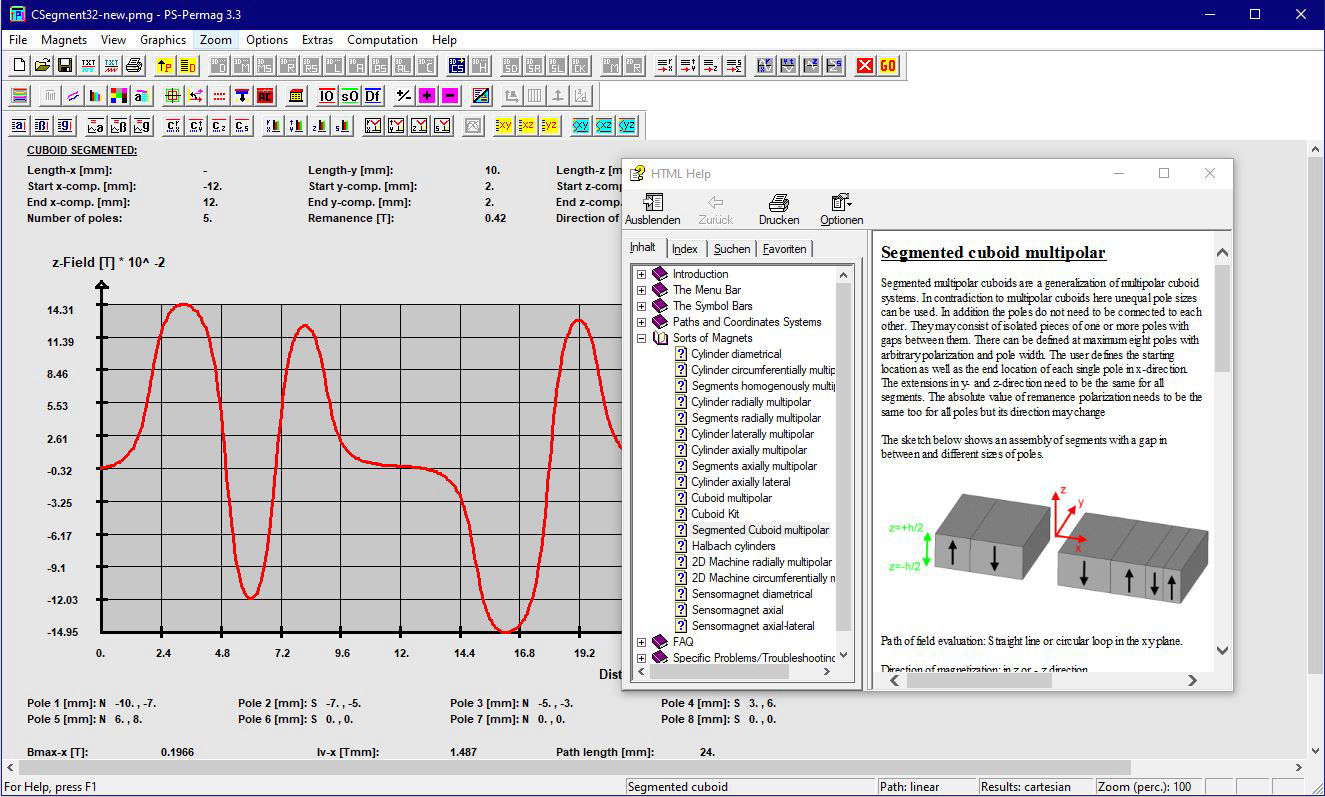
PS-PERMAG 3.3: The software not only analyzes cylindrical systems with discrete rotational symmetry. It is also possible to analyze hexaeder systems (cuboids) as well as segmented systems of different shapes. The example below shows two magnets with magnetization through their head faces with an air gap between them. The path for the field calculation is located above the pole faces. The magnets are positioned on a soft magnetic plate.
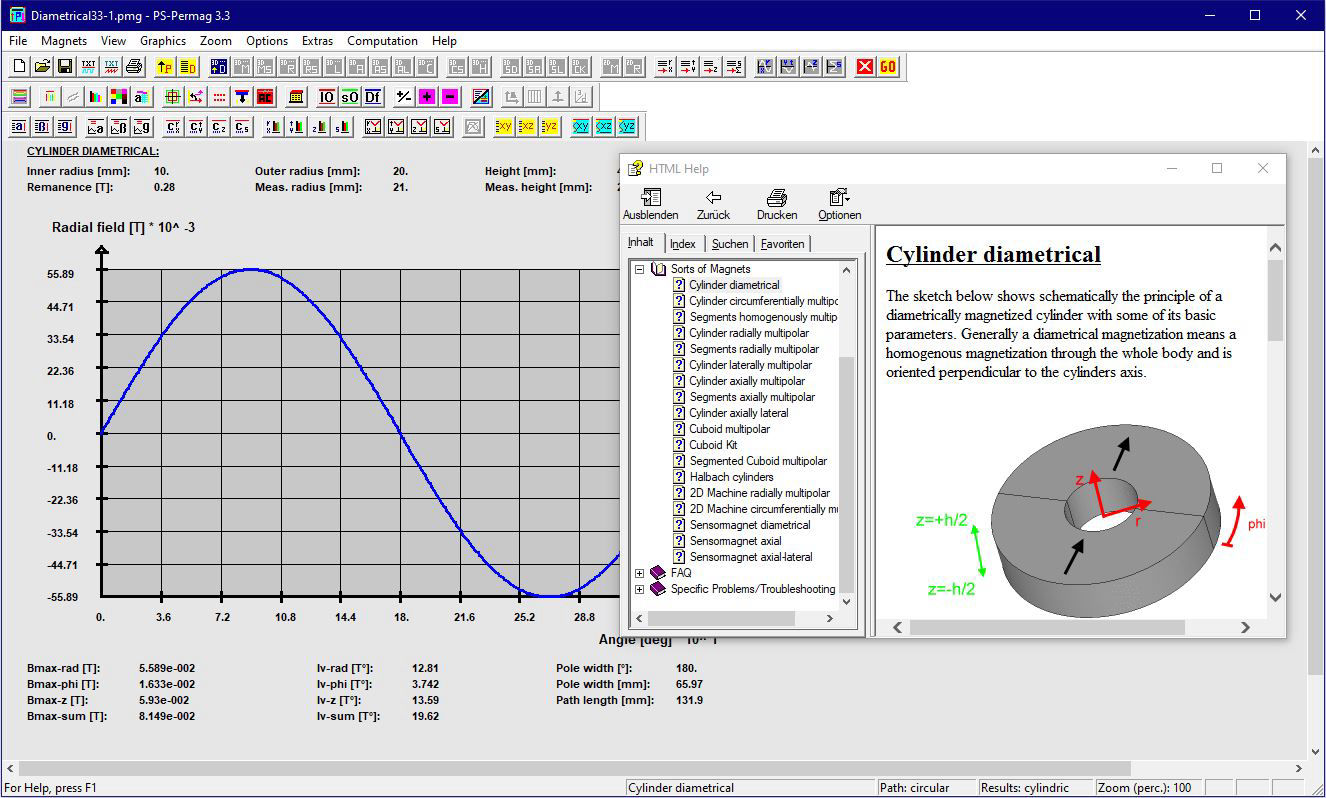
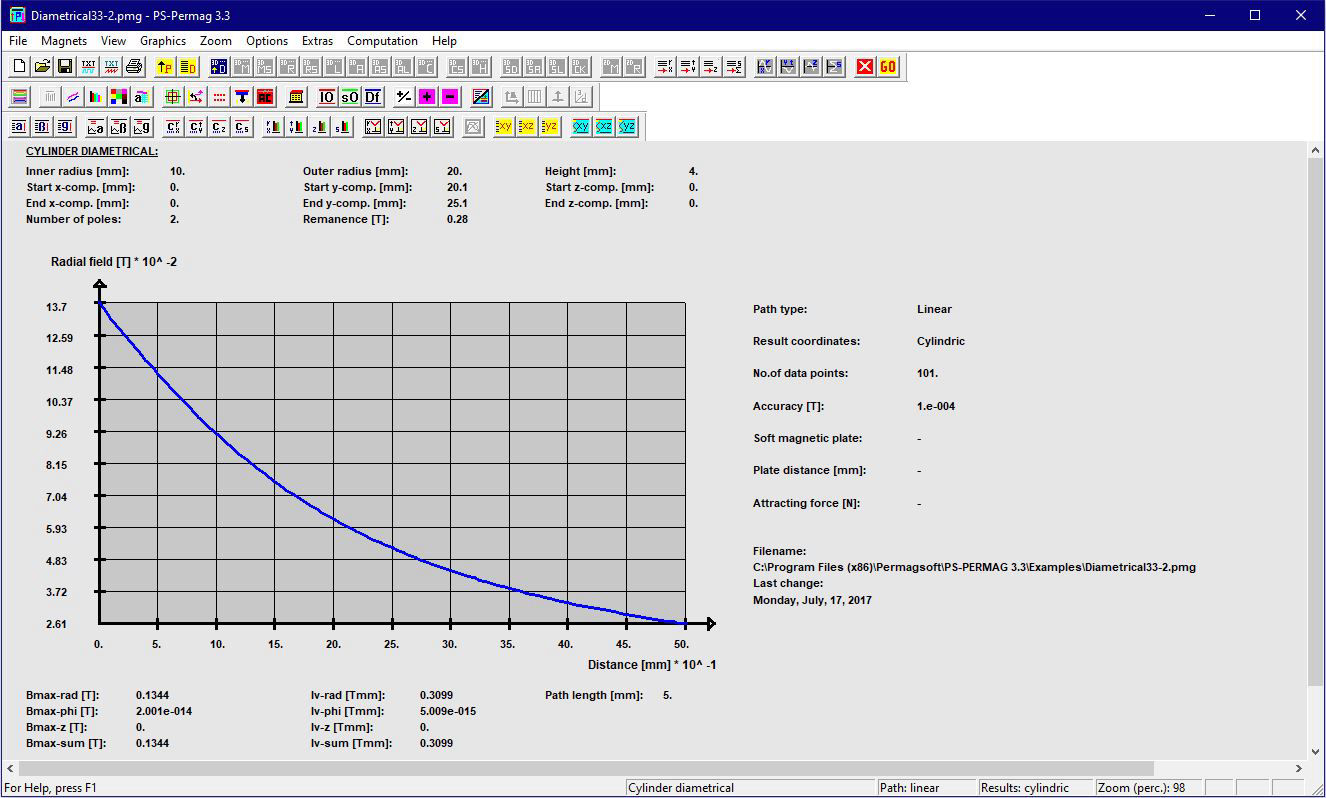
PS-PERMAG 3.3: For all sorts of magnets straight line as well as circular paths outside or inside the magnet can be defined for the purpose of field calculation. All field components can be calculated in cylindrical or in cartesian coordinates. The following screenshot shows the typical decrease of the radial field on a linear path in front of a diametrically magnetized cylinder.
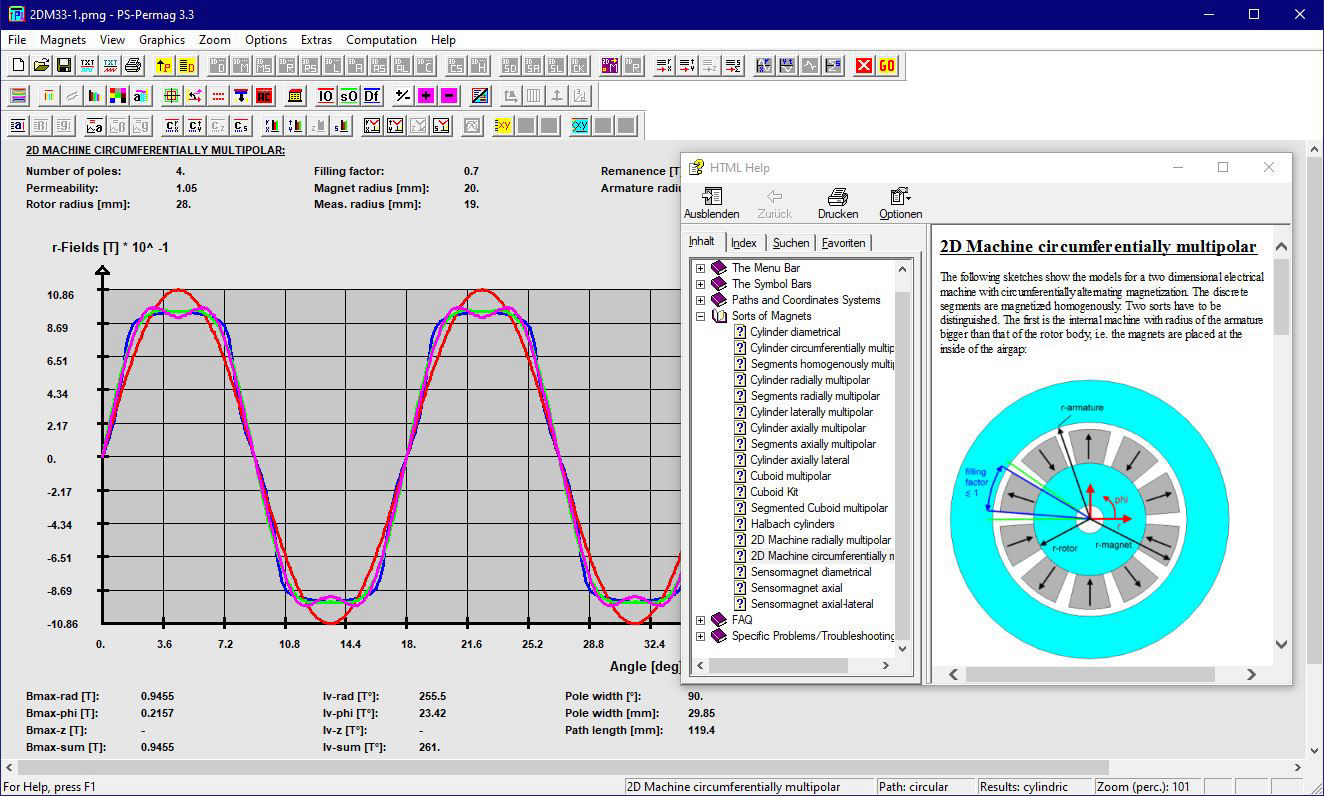
PS-PERMAG 3.3: Multipolar hexahedrons (cuboids) as well as axially multipolar cylinders can be treated also in the neighborhood of soft magnetic plates. Beside of this, in addition simple models for rotational electrical machines are provided by PS-PERMAG. Here armature and housing are treated as soft magnetic cylinders. The alternating permanent magnets can completely cover the rotor body or can be constricted in their tangential extension by a filling factor < 1. Homogenous as well as radial magnetization of the segments is supported as well as inner and outer rotor assemblies. In contradiction to the other systems the electrical machine models are 2D only. The screenshot below shows an example for an assembly with homogenous magnetization of the segments.
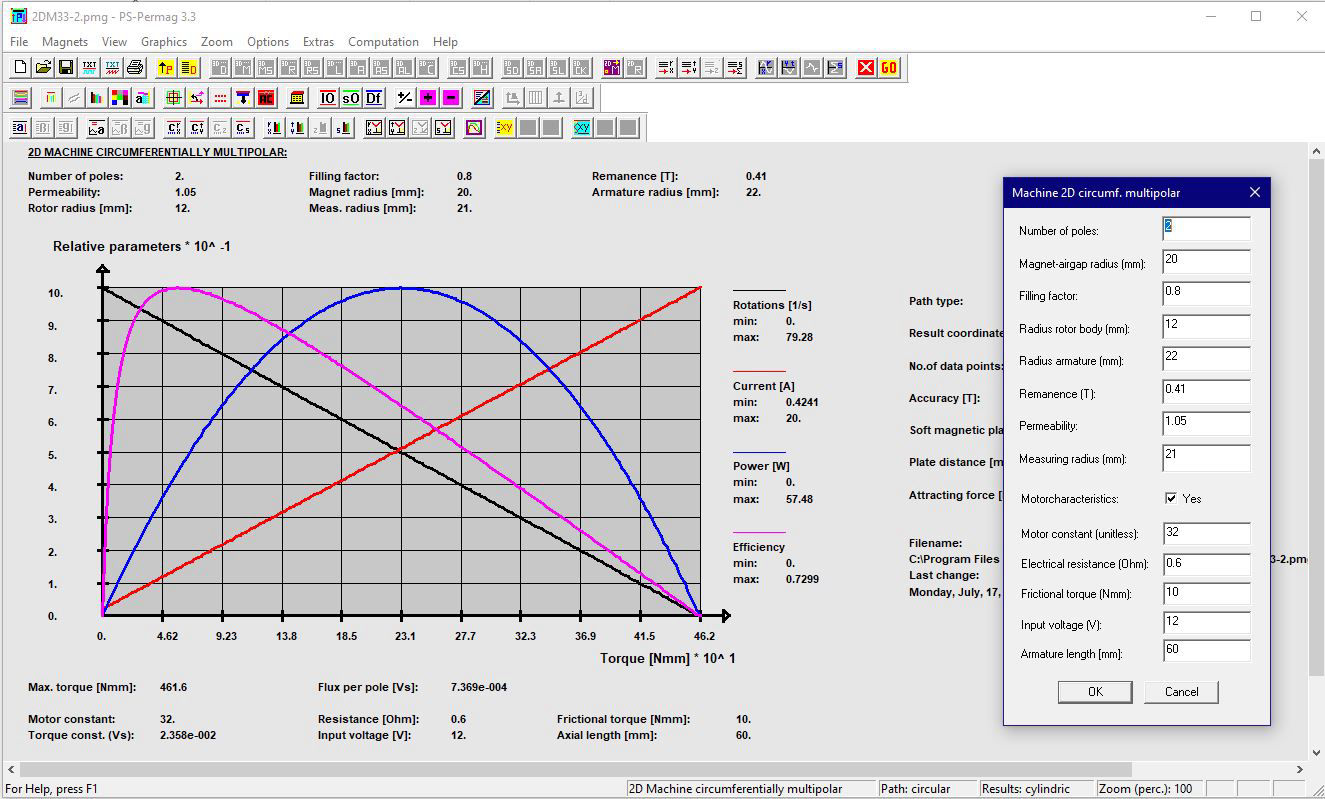
PS-PERMAG 3.3: For electrical DC machines the software can compute their torque constant by use of the air gap flux density. This leads to a calculation of the motor respond curves. The machines characteristic parameters are speed, power, efficiency and current as a function of torque. The picture below shows a related example.
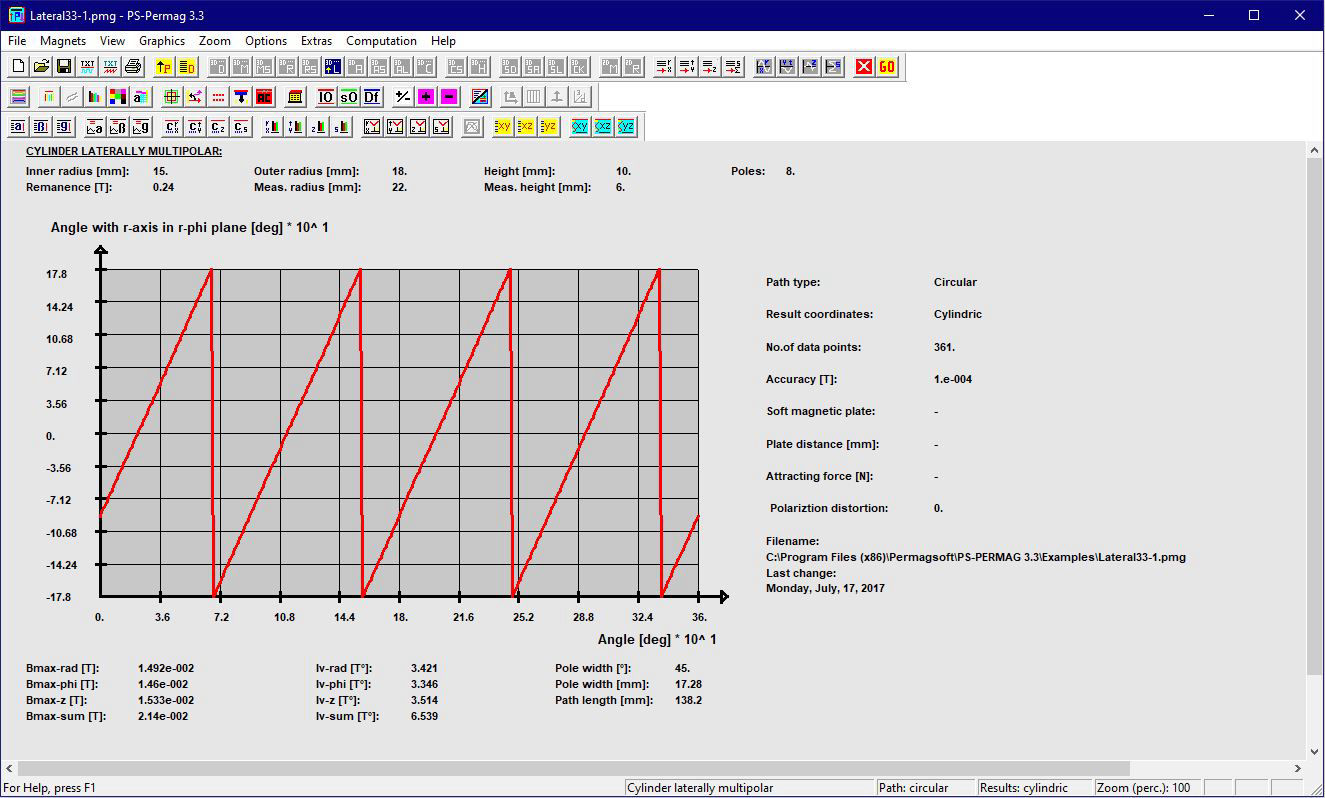
PS-PERMAG 3.3: For production of sensor systems, especially for MR- or Hall- based sensors, the knowledge of the angular distribution of magnetic fields is of relevance. For e.g. a rotational angular sensor the signal should show a good linearity on a circular path around the magnet. The screenshot below shows the resulting field angle of a multipolar lateral magnet in the r-phi plane with a linearly behavior.
PS-PERMAG 3.3: In version 3.1 beside axially magnetized cylinders and cuboids irregular pole structures are available. The positions of the single poles are given in by a respective dialog mask. At maximum 8 poles can be defined. The single segments can be separated by spatial gaps when needed.
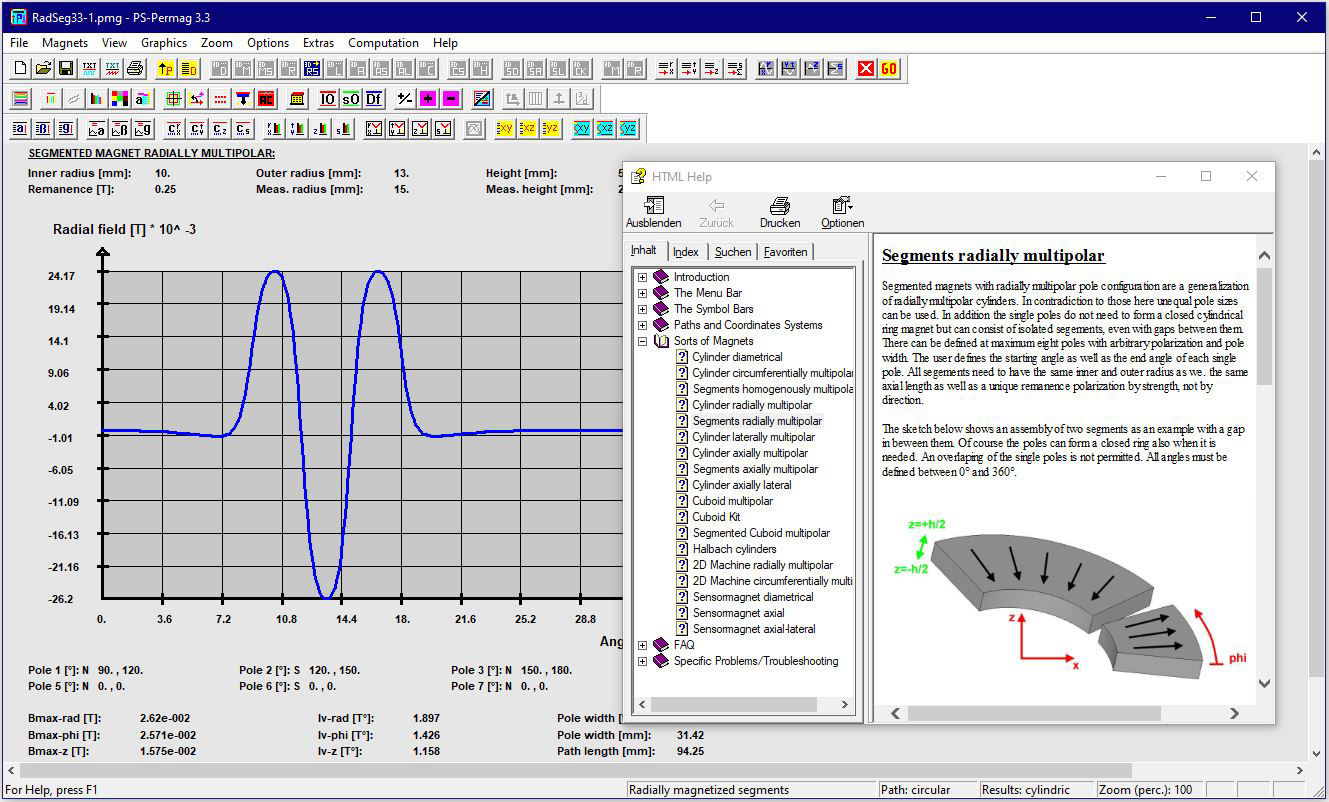
PS-PERMAG 3.3: Segmented magnet with radial magnetization. Up to 8 poles per configuration can be modeled. Beside closed assemblies also assemblies with gaps between the segments can be treated.
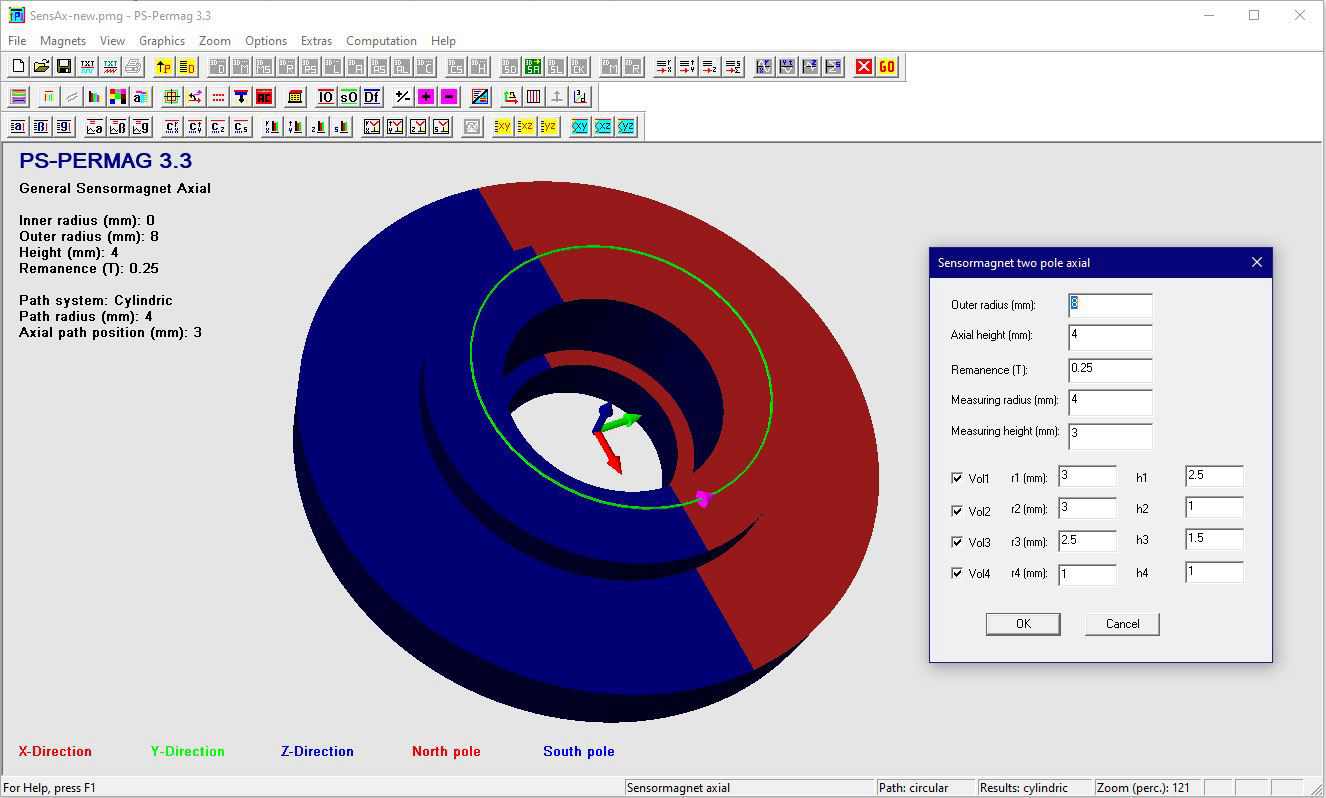
PS-PERMAG 3.3: In version 3.1 two pole sensormagnets with optional ledges and depressions have been introduced. Such structures influence field homogeneity, which is of serious importance e.g. for the design and optimization of magnetic sensors for rotating systems. Those ledges or depressions can be defined by additional volumes which are subtracted from a cylindrical base geometry, see in the picture below as an example. The related magnets can have a diametrical, two pole axial or an axial-lateral (one sided bow shaped) magnetization.